智能家居简介
智能家居是以住宅为平台,利用综合布线技术、网络通信技术、安全防范技术、自动控制技术、音视频技术将家居生活有关的设施集成,构建高效的住宅设施与家庭日程事务的管理系统,提升家居安全性、便利性、舒适性、艺术性,并实现环保节能的居住环境。
项目实现
基于ESP8266、ESP32-CAM所开发设计智能家居设备,含温度检测,灯条控制,电脑LAN唤醒,智能摄像车等多个物联网智能家居项目,综合小爱同学,小度,天猫精灵等多平台适配。
具体步骤
使用WiFi接入,当设备和手机在同一个局域网中,为局域网通信,其余情况,使用MQTT远程通信。
Arduino IDE需安装好esp8266/esp32扩展
Arduino IDE 1.8.7或更新版本
务必使用 3.0.0 或以上release版本的 ESP8266/esp32 Arduino package
1.PC的WOL唤醒,是通过UDP广播实现,配合主板实现网络唤醒开机,关机可以配合关机UDP广播实现,以 esp8266 为例:
1#define BLINKER_WIFI
2#define BLINKER_MIOT_OUTLET
3
4#define BLINKER_DUEROS_OUTLET
5
6#define BLINKER_ALIGENIE_OUTLET
7
8//#define BLINKER_WITHOUT_SSL
9
10#include <Servo.h>
11#include <Blinker.h>
12#include <WiFiUDP.h>
13#include <ESP8266Ping.h>
14
15char auth[] = "35a74dc36a92";
16char ssid[] = "Sweet_meng";
17char pswd[] = "aita0116.";
18
19BlinkerButton Button1("k1");
20BlinkerSlider Slider1("ser-num"); //实时位置 滑块 数据键名 范围1-180
21
22Servo myservo;
23int ser_num;
24//唤醒目标电脑的mac地址
25byte mac[] = {0x00, 0xE0, 0x70, 0x49, 0x1D, 0xE7};
26byte preamble[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF};
27//幻数据包需要在局域网中广播发送,要控制的电脑的网段的255地址
28IPAddress ip(192, 168, 0, 255);
29//建立一个WiFiUDP对象 UDP
30WiFiUDP UDP;
31//UDP接收地址,我这里是使用的广播,注意网段
32const char *UDPAddress = "192.168.0.108";
33//UDP端口
34const int UDPPort = 7101;
35bool oState = false;
36
37void heartbeat()
38{
39 BLINKER_LOG("heartbeat,state: ", oState);
40 if (HIGH == oState)
41 {
42 Button1.print("on");
43 }
44 else
45 {
46 Button1.print("off");
47 }
48}
49
50void button1_callback(const String &state)
51{
52 BLINKER_LOG("get button state: ", state);
53 if (state == BLINKER_CMD_ON)
54 {
55 BLINKER_LOG("Toggle on!");
56 UDP.beginPacket(ip, 9); //UDP发送到目标(IP,端口)
57 UDP.write(preamble, sizeof preamble); //写入包头(FF,FF,FF,FF,FF,FF)
58 for (byte i = 0; i < 16; i++)
59 {
60 UDP.write(mac, sizeof mac);
61 }
62 BLINKER_LOG("唤醒主机");
63 UDP.endPacket();
64 Button1.print("on");
65 oState = true;
66 }
67 else if (state == BLINKER_CMD_OFF)
68 {
69 BLINKER_LOG("Toggle off!");
70 char sd[] = "shut"; //与电脑相对应的指令
71 UDP.beginPacket(UDPAddress, UDPPort); //准备发送,设置地址和端口
72 UDP.write((char *)sd, 8);
73 BLINKER_LOG("关闭主机");
74 UDP.endPacket();
75 Button1.print("off");
76 oState = false;
77 }
78 BlinkerMIOT.powerState(oState ? "on" : "off");
79 BlinkerMIOT.print();
80
81 BlinkerDuerOS.powerState(oState ? "on" : "off");
82 BlinkerDuerOS.print();
83
84 BlinkerAliGenie.powerState(oState ? "on" : "off");
85 BlinkerAliGenie.print();
86}
87
88void slider1_callback(int32_t value)
89{
90 ser_num = value;
91 myservo.write(ser_num);
92 Blinker.delay(500);
93 BLINKER_LOG("get slider value: ", value);
94}
95
96void miotPowerState(const String &state)
97{
98 BLINKER_LOG("need set power state: ", state);
99 if (state == BLINKER_CMD_ON)
100 {
101 UDP.beginPacket(ip, 9); //UDP发送到目标(IP,端口)
102 UDP.write(preamble, sizeof preamble); //写入包头(FF,FF,FF,FF,FF,FF)
103 for (byte i = 0; i < 16; i++)
104 {
105 UDP.write(mac, sizeof mac);
106 }
107 BLINKER_LOG("唤醒主机");
108 UDP.endPacket();
109 oState = true;
110 }
111 else if (state == BLINKER_CMD_OFF)
112 {
113 char sd[] = "shut"; //与电脑相对应的指令
114 UDP.beginPacket(UDPAddress, UDPPort); //准备发送,设置地址和端口
115 UDP.write((char *)sd, 8);
116 BLINKER_LOG("关闭主机");
117 UDP.endPacket();
118 oState = false;
119 }
120 BlinkerMIOT.powerState(oState ? "on" : "off");
121 BlinkerMIOT.print();
122}
123
124void miotQuery(int32_t queryCode)
125{
126 BLINKER_LOG("MIOT Query codes: ", queryCode);
127 switch (queryCode)
128 {
129 case BLINKER_CMD_QUERY_ALL_NUMBER:
130 BLINKER_LOG("MIOT Query All");
131 BlinkerMIOT.powerState(oState ? "on" : "off");
132 BlinkerMIOT.print();
133 break;
134 case BLINKER_CMD_QUERY_POWERSTATE_NUMBER:
135 BLINKER_LOG("MIOT Query Power State");
136 BlinkerMIOT.powerState(oState ? "on" : "off");
137 BlinkerMIOT.print();
138 break;
139 default:
140 BlinkerMIOT.powerState(oState ? "on" : "off");
141 BlinkerMIOT.print();
142 break;
143 }
144}
145
146void duerPowerState(const String &state)
147{
148 BLINKER_LOG("need set power state: ", state);
149 if (state == BLINKER_CMD_ON)
150 {
151 UDP.beginPacket(ip, 9); //UDP发送到目标(IP,端口)
152 UDP.write(preamble, sizeof preamble); //写入包头(FF,FF,FF,FF,FF,FF)
153 for (byte i = 0; i < 16; i++)
154 {
155 UDP.write(mac, sizeof mac);
156 }
157 BLINKER_LOG("唤醒主机");
158 UDP.endPacket();
159 oState = true;
160 }
161 else if (state == BLINKER_CMD_OFF)
162 {
163 char sd[] = "shut"; //与电脑相对应的指令
164 UDP.beginPacket(UDPAddress, UDPPort); //准备发送,设置地址和端口
165 UDP.write((char *)sd, 8);
166 BLINKER_LOG("关闭主机");
167 UDP.endPacket();
168 oState = false;
169 }
170 BlinkerDuerOS.powerState(oState ? "on" : "off");
171 BlinkerDuerOS.print();
172}
173
174void duerQuery(int32_t queryCode)
175{
176 BLINKER_LOG("DuerOS Query codes: ", queryCode);
177 switch (queryCode)
178 {
179 case BLINKER_CMD_QUERY_ALL_NUMBER:
180 BLINKER_LOG("DuerOS Query All");
181 BlinkerDuerOS.powerState(oState ? "on" : "off");
182 BlinkerDuerOS.time(millis());
183 BlinkerDuerOS.print();
184 break;
185 case BLINKER_CMD_QUERY_POWERSTATE_NUMBER:
186 BLINKER_LOG("DuerOS Query Power State");
187 BlinkerDuerOS.powerState(oState ? "on" : "off");
188 BlinkerDuerOS.print();
189 break;
190 case BLINKER_CMD_QUERY_TIME_NUMBER:
191 BLINKER_LOG("DuerOS Query time");
192 BlinkerDuerOS.time(millis());
193 BlinkerDuerOS.print();
194 break;
195 default:
196 BlinkerDuerOS.powerState(oState ? "on" : "off");
197 BlinkerDuerOS.time(millis());
198 BlinkerDuerOS.print();
199 break;
200 }
201}
202
203void aligeniePowerState(const String &state)
204{
205 BLINKER_LOG("need set power state: ", state);
206 if (state == BLINKER_CMD_ON)
207 {
208 UDP.beginPacket(ip, 9); //UDP发送到目标(IP,端口)
209 UDP.write(preamble, sizeof preamble); //写入包头(FF,FF,FF,FF,FF,FF)
210 for (byte i = 0; i < 16; i++)
211 {
212 UDP.write(mac, sizeof mac);
213 }
214 BLINKER_LOG("唤醒主机");
215 UDP.endPacket();
216 oState = true;
217 }
218 else if (state == BLINKER_CMD_OFF)
219 {
220 char sd[] = "shut"; //与电脑相对应的指令
221 UDP.beginPacket(UDPAddress, UDPPort); //准备发送,设置地址和端口
222 UDP.write((char *)sd, 8);
223 BLINKER_LOG("关闭主机");
224 UDP.endPacket();
225 oState = false;
226 }
227 BlinkerAliGenie.powerState(oState ? "on" : "off");
228 BlinkerAliGenie.print();
229}
230
231void aligenieQuery(int32_t queryCode)
232{
233 BLINKER_LOG("AliGenie Query codes: ", queryCode);
234 switch (queryCode)
235 {
236 case BLINKER_CMD_QUERY_ALL_NUMBER:
237 BLINKER_LOG("AliGenie Query All");
238 BlinkerAliGenie.powerState(oState ? "on" : "off");
239 BlinkerAliGenie.print();
240 break;
241 case BLINKER_CMD_QUERY_POWERSTATE_NUMBER:
242 BLINKER_LOG("AliGenie Query Power State");
243 BlinkerAliGenie.powerState(oState ? "on" : "off");
244 BlinkerAliGenie.print();
245 break;
246 default:
247 BlinkerAliGenie.powerState(oState ? "on" : "off");
248 BlinkerAliGenie.print();
249 break;
250 }
251}
252
253void dataRead(const String &data)
254{
255 BLINKER_LOG("Blinker readString: ", data);
256 Blinker.vibrate();
257 uint32_t BlinkerTime = millis();
258 Blinker.print("millis", BlinkerTime);
259}
260
261void setup()
262{
263 Serial.begin(115200);
264 BLINKER_DEBUG.stream(Serial);
265 // BLINKER_DEBUG.debugAll();
266
267 myservo.attach(0); //servo.attach():设置舵机数据引脚
268 myservo.write(90); //servo.write():设置转动角度
269
270 Button1.attach(button1_callback);
271 Slider1.attach(slider1_callback);
272 Blinker.attachHeartbeat(heartbeat);
273
274 Blinker.begin(auth, ssid, pswd);
275 Blinker.attachData(dataRead);
276
277 BlinkerMIOT.attachPowerState(miotPowerState);
278 BlinkerMIOT.attachQuery(miotQuery);
279
280 BlinkerDuerOS.attachPowerState(duerPowerState);
281 BlinkerDuerOS.attachQuery(duerQuery);
282
283 BlinkerAliGenie.attachPowerState(aligeniePowerState);
284 BlinkerAliGenie.attachQuery(aligenieQuery);
285}
286
287void loop()
288{
289 Blinker.run();
290}
2.WS2812的灯带,配合FastLED库,可以配合实现多种灯光效果,以 esp8266 为例:
1///////////////////////////////////////////////////////////////////////////K1灯效FastLED(依赖K2灯效FastLED)
2
3typedef void (*SimplePatternList1[])();
4SimplePatternList1 gPatterns1 = {rainbow}; //rainbow, rainbowWithGlitter, confetti, sinelon, juggle, bpm 6种特效切换
5
6///////////////////////////////////////////////////////////////////////////K2灯效FastLED
7// List of patterns to cycle through. Each is defined as a separate function below.
8typedef void (*SimplePatternList[])();
9SimplePatternList gPatterns = {juggle}; //rainbow, rainbowWithGlitter, confetti, sinelon, juggle, bpm 6种特效切换
10
11uint8_t gCurrentPatternNumber = 0; // Index number of which pattern is current
12uint8_t gHue = 0; // rotating "base color" used by many of the patterns
13
14#define ARRAY_SIZE(A) (sizeof(A) / sizeof((A)[0]))
15
16void nextPattern()
17{
18 // add one to the current pattern number, and wrap around at the end
19 gCurrentPatternNumber = (gCurrentPatternNumber + 1) % ARRAY_SIZE(gPatterns);
20}
21
22void rainbow()
23{
24 // FastLED's built-in rainbow generator
25 fill_rainbow(leds, NUM_LEDS, gHue, 3);
26}
27
28void rainbowWithGlitter()
29{
30 // built-in FastLED rainbow, plus some random sparkly glitter
31 rainbow();
32 addGlitter(80);
33}
34
35void addGlitter(fract8 chanceOfGlitter)
36{
37 if (random8() < chanceOfGlitter)
38 {
39 leds[random16(NUM_LEDS)] += CRGB::White;
40 }
41}
42
43void confetti()
44{
45 // random colored speckles that blink in and fade smoothly
46 fadeToBlackBy(leds, NUM_LEDS, 10);
47 int pos = random16(NUM_LEDS);
48 leds[pos] += CHSV(gHue + random8(64), 200, 255);
49}
50
51void sinelon()
52{
53 // a colored dot sweeping back and forth, with fading trails
54 fadeToBlackBy(leds, NUM_LEDS, 20);
55 int pos = beatsin16(13, 0, NUM_LEDS - 1);
56 leds[pos] += CHSV(gHue, 255, 192);
57}
58
59void bpm()
60{
61 // colored stripes pulsing at a defined Beats-Per-Minute (BPM)
62 uint8_t BeatsPerMinute = 62;
63 CRGBPalette16 palette = PartyColors_p;
64 uint8_t beat = beatsin8(BeatsPerMinute, 64, 255);
65 for (int i = 0; i < NUM_LEDS; i++)
66 { //9948
67 leds[i] = ColorFromPalette(palette, gHue + (i * 2), beat - gHue + (i * 10));
68 }
69}
70
71void juggle()
72{
73 // eight colored dots, weaving in and out of sync with each other
74 fadeToBlackBy(leds, NUM_LEDS, 20);
75 byte dothue = 0;
76 for (int i = 0; i < 8; i++)
77 {
78 leds[beatsin16(i + 7, 0, NUM_LEDS - 1)] |= CHSV(dothue, 200, 255);
79 dothue += 32;
80 }
81}
82
83///////////////////////////////////////////////////////////////////////////K3灯效
84//冷却:空气上升时会冷却多少?
85//冷却少=火焰高。 冷却更多=火焰更短。
86//默认值50,建议范围20-100
87#define COOLING 50
88
89//发出火花:有什么机会(总共255个)点燃新的火花?
90//更高的机会=更多的怒吼。 机会降低=火势更加闪烁。
91//默认值为120,建议范围为50-200。
92#define SPARKING 120
93bool gReverseDirection = false;
94void Fire2012()
95{
96 // Array of temperature readings at each simulation cell
97 static byte heat[NUM_LEDS];
98
99 // Step 1. Cool down every cell a little
100 for (int i = 0; i < NUM_LEDS; i++)
101 {
102 heat[i] = qsub8(heat[i], random8(0, ((COOLING * 10) / NUM_LEDS) + 2));
103 }
104
105 // Step 2. Heat from each cell drifts 'up' and diffuses a little
106 for (int k = NUM_LEDS - 1; k >= 2; k--)
107 {
108 heat[k] = (heat[k - 1] + heat[k - 2] + heat[k - 2]) / 3;
109 }
110
111 // Step 3. Randomly ignite new 'sparks' of heat near the bottom
112 if (random8() < SPARKING)
113 {
114 int y = random8(7);
115 heat[y] = qadd8(heat[y], random8(160, 255));
116 }
117
118 // Step 4. Map from heat cells to LED colors
119 for (int j = 0; j < NUM_LEDS; j++)
120 {
121 CRGB color = HeatColor(heat[j]);
122 int pixelnumber;
123 if (gReverseDirection)
124 {
125 pixelnumber = (NUM_LEDS - 1) - j;
126 }
127 else
128 {
129 pixelnumber = j;
130 }
131 leds[pixelnumber] = color;
132 }
133}
134
135///////////////////////////////////////////////////////////////////////////K4灯效
136#if FASTLED_VERSION < 3001000
137#error "Requires FastLED 3.1 or later; check github for latest code."
138#endif
139// This function draws rainbows with an ever-changing,
140// widely-varying set of parameters.
141void pride()
142{
143 static uint16_t sPseudotime = 0;
144 static uint16_t sLastMillis = 0;
145 static uint16_t sHue16 = 0;
146
147 uint8_t sat8 = beatsin88(87, 220, 250);
148 uint8_t brightdepth = beatsin88(341, 96, 224);
149 uint16_t brightnessthetainc16 = beatsin88(203, (25 * 256), (40 * 256));
150 uint8_t msmultiplier = beatsin88(147, 23, 60);
151
152 uint16_t hue16 = sHue16; //gHue * 256;
153 uint16_t hueinc16 = beatsin88(113, 1, 3000);
154
155 uint16_t ms = millis();
156 uint16_t deltams = ms - sLastMillis;
157 sLastMillis = ms;
158 sPseudotime += deltams * msmultiplier;
159 sHue16 += deltams * beatsin88(400, 5, 9);
160 uint16_t brightnesstheta16 = sPseudotime;
161
162 for (uint16_t i = 0; i < NUM_LEDS; i++)
163 {
164 hue16 += hueinc16;
165 uint8_t hue8 = hue16 / 256;
166
167 brightnesstheta16 += brightnessthetainc16;
168 uint16_t b16 = sin16(brightnesstheta16) + 32768;
169
170 uint16_t bri16 = (uint32_t)((uint32_t)b16 * (uint32_t)b16) / 65536;
171 uint8_t bri8 = (uint32_t)(((uint32_t)bri16) * brightdepth) / 65536;
172 bri8 += (255 - brightdepth);
173
174 CRGB newcolor = CHSV(hue8, sat8, bri8);
175
176 uint16_t pixelnumber = i;
177 pixelnumber = (NUM_LEDS - 1) - pixelnumber;
178
179 nblend(leds[pixelnumber], newcolor, 64);
180 }
181}
182void mode_2()
183{
184 if (BRIGHTNESS < 20)
185 {
186 BRIGHTNESS = 20;
187 Slider1.print(BRIGHTNESS);
188 }
189 FastLED.setBrightness(BRIGHTNESS); //实时更新亮度
190 gPatterns1[gCurrentPatternNumber]();
191 FastLED.show();
192 FastLED.delay(200 / UPDATES_PER_SECOND);
193 EVERY_N_MILLISECONDS(20) { gHue++; } // slowly cycle the "base color" through the rainbow
194 EVERY_N_SECONDS(10) { nextPattern(); } // change patterns periodically
195}
196
197void mode_3()
198{
199 if (BRIGHTNESS < 20)
200 {
201 BRIGHTNESS = 20;
202 Slider1.print(BRIGHTNESS);
203 }
204 FastLED.setBrightness(BRIGHTNESS); //实时更新亮度
205 gPatterns[gCurrentPatternNumber]();
206 FastLED.show();
207 FastLED.delay(1000 / (UPDATES_PER_SECOND / 10));
208
209 // do some periodic updates
210 EVERY_N_MILLISECONDS(20) { gHue++; } // slowly cycle the "base color" through the rainbow
211 EVERY_N_SECONDS(10) { nextPattern(); } // change patterns periodically
212}
213
214void mode_4()
215{
216 if (BRIGHTNESS < 20)
217 {
218 BRIGHTNESS = 20;
219 Slider1.print(BRIGHTNESS);
220 }
221 Fire2012();
222 FastLED.setBrightness(BRIGHTNESS); //实时更新亮度
223 FastLED.delay(1000 / UPDATES_PER_SECOND);
224}
225
226void mode_5()
227{
228 if (BRIGHTNESS < 20)
229 {
230 BRIGHTNESS = 20;
231 Slider1.print(BRIGHTNESS);
232 }
233 FastLED.setBrightness(BRIGHTNESS); //实时更新亮度
234 pride();
235 FastLED.show();
236 FastLED.delay(1000 / (UPDATES_PER_SECOND / 5));
237}
238
3.ESP32-CAM带有一个摄像头,可以搭建一个视频监控车,ESP32-CAM底座原理图和PCB,以及小车底座PCB如下:
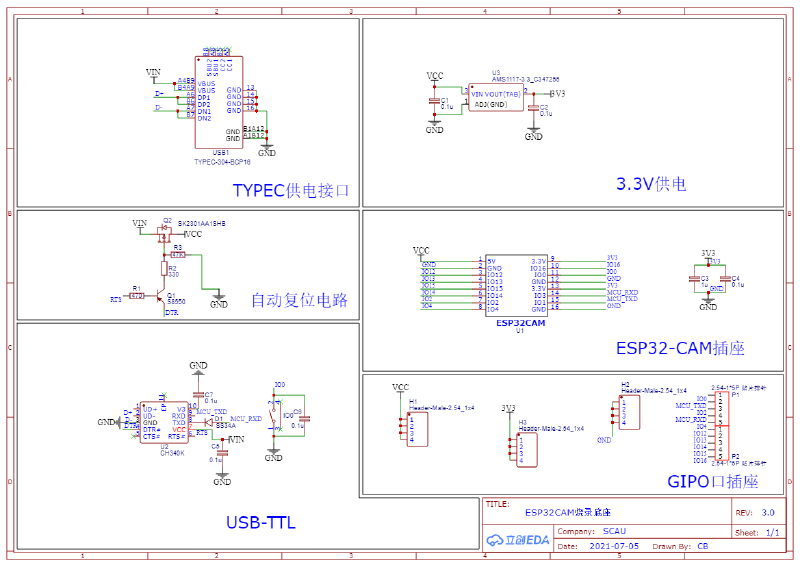
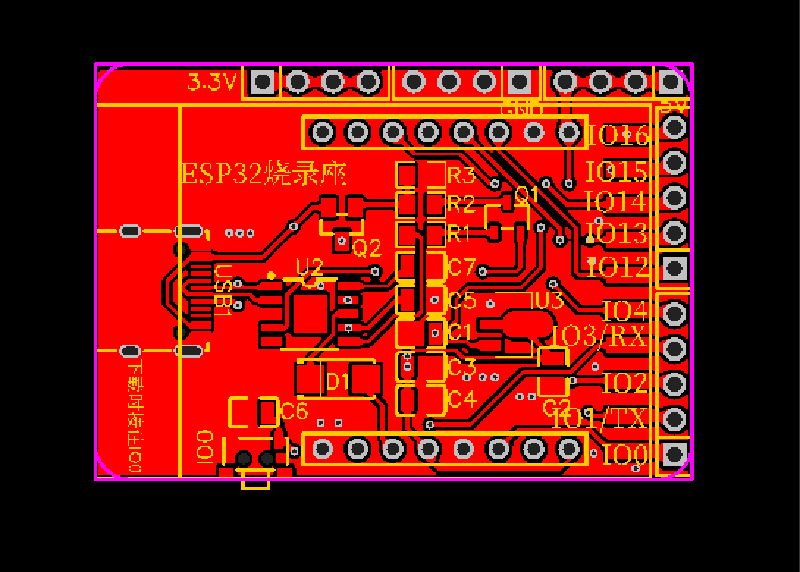
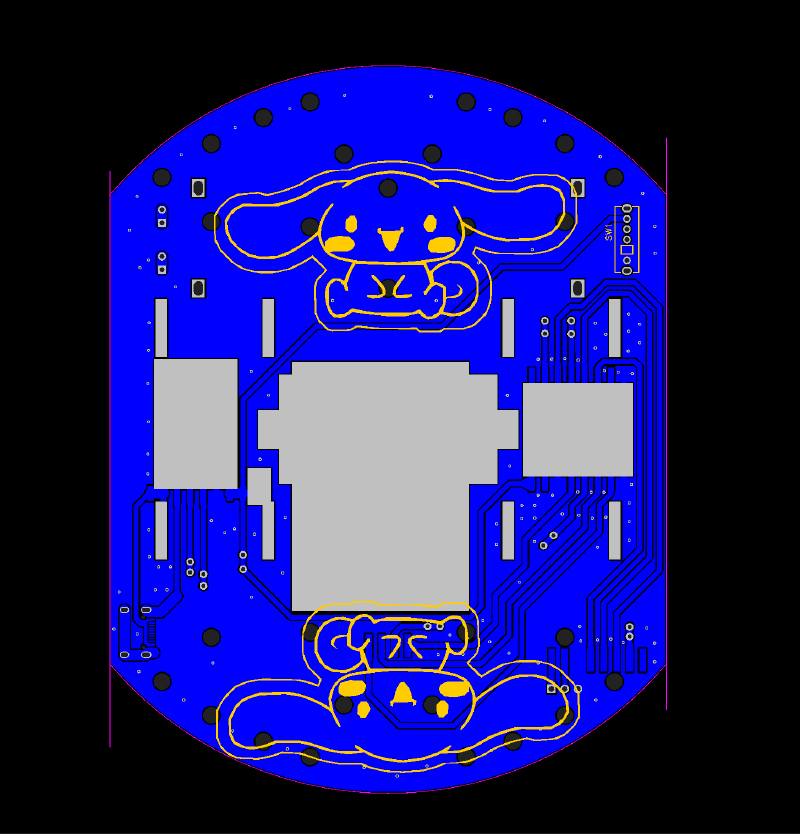
以 esp32 为例:
1int calculatePWM(int degree) //舵机角度
2{
3 //20ms周期,高电平0.5-2.5ms,对应0-180度角度
4 const float deadZone = 6.4; //对应0.5ms(0.5ms/(20ms/256))
5 const float max = 32; //对应2.5ms
6 if (degree < 0)
7 degree = 0;
8 if (degree > 180)
9 degree = 180;
10 return (int)(((max - deadZone) / 180) * degree + deadZone);
11}
12
13void servo_360() //360度舵机控制
14{
15 if (y < 128)
16 {
17 ledcWrite(servo_channel, calculatePWM(88)); // 输出PWM
18 }
19 else if (y == 128)
20 {
21 ledcWrite(servo_channel, calculatePWM(92)); // 输出PWM
22 }
23 else if (y > 128)
24 {
25 ledcWrite(servo_channel, calculatePWM(96)); // 输出PWM
26 }
27}
28
29void xunhuan()
30{
31 ledcWrite(servo_channel, calculatePWM(angle)); // 输出PWM
32 ledcWrite(flashled_channel, flashled_pwm); // 输出PWM
33 if ((y <= 37.5) && (x >= 37.5) && (x <= 217.5))//前进
34 {
35 ledcWrite(motorA1_channel, motor_pwm);
36 ledcWrite(motorA2_channel, 0);
37 ledcWrite(motorB1_channel, motor_pwm);
38 ledcWrite(motorB2_channel, 0);
39 }
40 if ((x <= 37.5) && (y >= 37.5) && (y <= 217.5))//左转
41 {
42 ledcWrite(motorA1_channel, 0);
43 ledcWrite(motorA2_channel, motor_pwm);
44 ledcWrite(motorB1_channel, motor_pwm);
45 ledcWrite(motorB2_channel, 0);
46 }
47 if ((x >= 217.5) && (y >= 37.5) && (y <= 217.5))//右转
48 {
49 ledcWrite(motorA1_channel, motor_pwm);
50 ledcWrite(motorA2_channel, 0);
51 ledcWrite(motorB1_channel, 0);
52 ledcWrite(motorB2_channel, motor_pwm);
53 }
54 if ((y >= 217.5) && (x >= 37.5) && (x <= 217.5))//后退
55 {
56 ledcWrite(motorA1_channel, 0);
57 ledcWrite(motorA2_channel, motor_pwm);
58 ledcWrite(motorB1_channel, 0);
59 ledcWrite(motorB2_channel, motor_pwm);
60 }
61 if ((x > 37.5) && (x < 217.5) && (y > 37.5) && (y < 217.5))//后退
62 {
63 ledcWrite(motorA1_channel, 0);
64 ledcWrite(motorA2_channel, 0);
65 ledcWrite(motorB1_channel, 0);
66 ledcWrite(motorB2_channel, 0);
67 }
68}
本文相关项目完整源码已上传本人gitee,点击查看更多智能家居项目源码,如智能风扇,智能空调,智能插座等等。